Robotics: Aerial Robotics
The Introduction to Robotics Specialization introduces you to the concepts of robot flight and movement, how robots perceive their environment, and how they adjust their movements to avoid obstacles, navigate difficult terrains and accomplish complex tasks such as construction and disaster recovery. You will be exposed to real world examples of how robots have been applied in disaster situations, how they have made advances in human health care and what their future capabilities will be. The courses build towards a capstone in which you will learn how to program a robot to perform a variety of
Created by: Vijay Kumar
 Quality Score
Quality Score
Overall Score : 88 / 100
 Live Chat with CourseDuck's Co-Founder for Help
Live Chat with CourseDuck's Co-Founder for Help
 Course Description
Course Description
 Instructor Details
Instructor Details

- 4.4 Rating
 138 Reviews
138 Reviews
Vijay Kumar
Vijay studies collective behaviors in biological and robotic systems. He and his group design novel architectures, create abstractions for systems of interacting individuals, and develop new algorithms for cooperating robots. The overarching themes in his research include modeling nature and developing bio-inspired architectures and algorithms, understanding group/individual dynamics, and the design and composition of controllers for robust, scalable autonomous systems. Vijay's key challenges include operation in unstructured, dynamic environments, integration of control, communication and perception, and scaling down to smaller sizes with limited actuation, sensing, and computational resources.
 Reviews
Reviews
- Video Duration:
 25h
25h - Price: Free 0 Track Price
- Provider:
 Coursera
Coursera - University:
 University of Pennsylvania
University of Pennsylvania - Language:
 English
English - Certificate:
 Yes
Yes
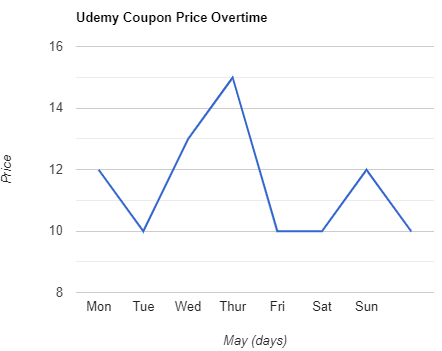
Coursera Coupon Price Tracker